Hallo zur Webseite von
DL1DMW
DL1DMW
Der Stromspar-Timer:
Nano Timer TPL5110
Speziell für Batterie getriebene Mikroelektronik wurde dieser Timer geschaffen. Zyklisch schaltet er die Spannungsversorgung einer Last ein und aus. Wir wagen einen Blick auf diesen interessanten IC.

Bild 1: Pinbelegung des TPL5110 Nano Power Timers. Quelle: Datenblatt.
Eine klassische Internet-der-Dinge-Anwendung ist die von einem Mikrocontroller gesteuerte Schaltung, die hin und wieder – in zyklischen Abständen sagen wir von zehn Minuten – eine bestimmte Aufgabe ausführt. Das kann typisch die Abfrage eines Sensors sein, dessen Messwert auf eine beliebige Weise, oft per Funk, übermittelt wird. Es könnte sich vielleicht um eine Temperatur, einen Druck oder einen beliebigen anderen Messwert handeln. Die Schaltung läuft in der Regel stundenlang durch und lediglich alle 10 Minuten hat der Mikrocontroller für einige Sekunden etwas zu tun. Danach ist er für mehr als 9 Minuten ohne Funktion, benötigt aber Strom. Wird das Gerät von einer Batterie gespeist und diese weost genug Kapazität auf, ist dagegen nichts einzuwenden. Doch: Wie man es wendet oder dreht: Es ist Stromverschwendung.

<- Bild 2: Das Diagramm zeigt die Stromaufnahme des Timers anhand der Betriebsspannung. Quelle: Datenblatt.
Nun kommt der Timer TPL5110 ins Spiel: Er sorgt dafür, dass die angesprochene Schaltung nur dann mit Spannung versorgt wird, wenn sie wirklich benötigt wird – im Beispiel alle zehn Minuten. In der Zwischenzeit ist die Schaltung aus, es läuft allein der Timer und der benötigt nur sehr wenig Strom: Laut Datenblatt begnügt sich der TPL5110 bei 2,5 Volt Betriebsspannung mit nur 0,000.000.035 Ampere, das sind winzige 35nA. Meine vorhandenen Messmittel reichen nicht aus, derart geringe Ströme sicher zu messen. Im Datenblatt entnimmt man einem Diagramm, dass der vom Timer benötigte Strom bei 3.3 Volt bei ca. 38nA liegt und bei 5 Volt beträgt er ca. 44nA (Bild 2). Dieser Baustein erlaubt es auch, nachträglich Schaltungen, die nicht für den Batteriebetrieb entwickelt wurden, auf diesen umzustellen.

<- Bild 3: Das Blockdiagramm des Timers. Quelle: Datenblatt.
Timer mit MOSFET-Treiber
Das Blockdiagramm zeigt Bild 3. Ein Oszillator samt Teiler bestimmen den Takt, der Decoder übernimmt zwei Aufgaben: Nach dem Einschalten wird der Wert des an Pin DELAY/M_DRV angeschlossenen externe Widerstandes ermittelt und so die Laufzeit des Timers in weiten Grenzen festgelegt. Anschließend wird der Widerstand per Multiplexer abgekoppelt, und Pin DELAY/M_DRV dient fortan als digitaler Eingang, um einen Taster für einen manuellen Reset zu erkennen. Der Block LOGIC CONTROL in Bild 3 enthält die benötigte Prozesssteuerung: Pin EN wird für den Timerbetrieb fest auf VDD gelegt. Im One-Shot-Modus durchläuft der Timer nur einen Zyklus und hält danach an. Pin DRV steuert das Gate eines P-Kanal MOSFETS an. Dieser Ausgang wird LOW, sobald der Timer abgelaufen ist und die Schaltung mit Strom versorgt werden soll. Dann wird der P-Kanal MOSFET leitend und der Mikrocontroller kann seinen Job verrichten. Er signalisiert via Pin DONE mit einer Änderung von LOW zu HIGH, dass er seine Aufgabe erfüllt hat und bis zum nächsten Zyklus auf Spannung verzichten kann. Pin DRV wird also HIGH, der P-Kanal-MOSFET sperrt.
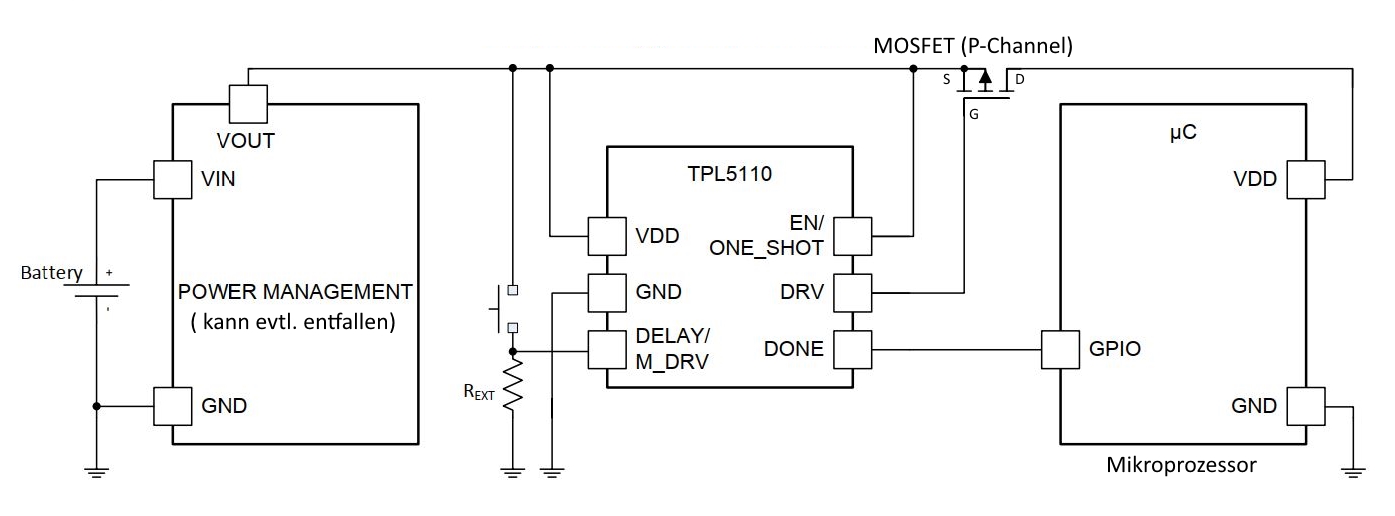
Bild 4: Prinzipielle Anwendung des Nano-Timers. Quelle: Datenblatt.
Die Beschaltung illustriert Bild 4, dem Datenblatt entnommen: Je nach Spannungsversorgung kann der hier vorhandene IC zum Power Management links im Bild entfallen. REXT bestimmt - wie beschrieben - die Laufzeit des Timers und wird in Prototypenschaltungen meist durch ein Potentiometer ersetzt. Die Zykluszeit ist flexibel zwischen 100ms und 7200 Sekunden – letzteres entspricht zwei Stunden - justierbar. Im Datenblatt gibt es zur Berechnung des Widerstandes eine Formel und eine Tabelle für populäre Zykluszeiten. Was man unbedingt beachten muss: Der zulässige Spannungsbereich beträgt 1,8 Volt bis 5,5 Volt! Höhere Spannungen würden den Timer zerstören. Und: Der DONE-Eingang darf nicht floaten! Wird DONE nicht benutzt und mit GND verbunden, reagiert der Timer so: Der Timer läuft ab, DRV wird LOW und bleibt es 50 ms vor Ablauf der Zykluszeit. Dann wird DRV für diese 50 ms HIGH und ein neuer Zyklus beginnt. Im Oszillogramm von DRV zeigt sich ein Dauerndes LOW, unterbrochen von 50 ms Highpegel. Der Normalfall ist jedoch, dass der Mikrocontroller via DONE meldet, dass sein Job getan ist.
Bauform: SMD
Die Bauform, die der Hersteller Texas Instruments für seinen Timer gewählt hat, ist ein sechspoliges SMD-Gehäuse mit der Bezeichnung SOT23. Damit der IC beim Zusammenstecken für Probeschaltungen handhabbar wird, wurde er auf eine kleine Lochrasterplatine bugsiert und mit dünnem Kupferdraht verlötet (Bild 5). Via übliche Pinheader sind die Anschlüsse für Dupont-Kabel (Jumperkabel) erreichbar. Weil es praktischer ist, wurde das kleine Breakout-Board mit doppelreihigen Anschlüssen ausgestattet, so ist jeder IC-Pin für zwei Kabel erreichbar. Das erleichtert oft die Verkabelung.
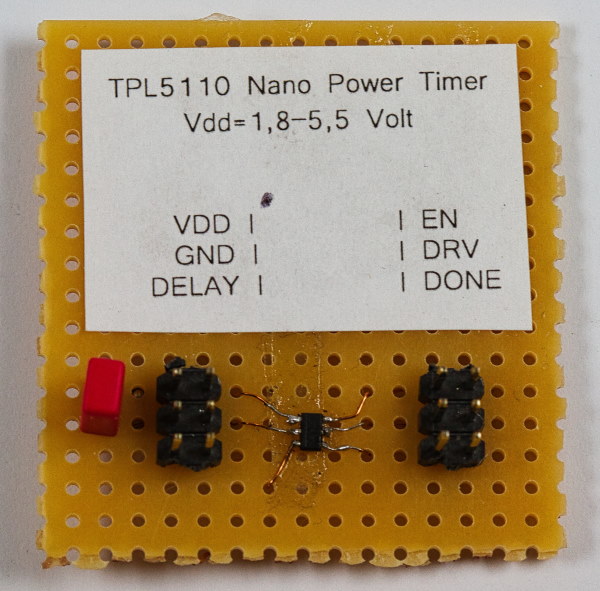
<- Bild 5: DIY Breakout Board für Prototypen.
Ein Testaufbau bestand aus einem Arduino Nano (mit 5V betrieben), einer LED als Last und einem P-Kanal-MOSFET mit der Bezeichnung Si2329DS. Dieser MOSFET-Transistor schaltet bei so geringen Spannungen von 3,3 und 5 Volt voll durch. Der maximale Spannungsunterschied zwischen Drain und Source darf 8 Volt nicht überschreiten. Das ist kein Problem, sofern die Batteriespannung nicht über 6 Volt (4 x 1,5-Volt-Zellen) festgelegt ist.
Mathematikstunde
Lassen Sie uns einmal rechnen: Zunächst ohne Timer. Der Arduino Nano benötigt etwa 40 mA Strom. Auf 10 Minuten gerechnet sind das 40mA * 600 Sekunden = 24000 mA/s. Nun die Rechnung mit Timer: Die Zykluszeit soll weiterhin 10 Minuten betragen und der Prozessor soll 10 Sekunden einen Job verrichten. Dann addiert sich das so: 40mA * 10 Sekunden = 400 mA/s plus 0,000.044 mA * 560 Sekunden = 0,02464 mA/s. Beide zusammen sind also 400 mA/s + 0,02464 mA/s = 400,02464 mA/s. Man sieht, dass der Betrieb des Timers kaum ins Gewicht fällt und der große Teil des Stromverbrauches in den zehn aktiven Sekunden stattfindet. In unserem Beispiel reduziert sich der Verbrauch von 24000 mA/s auf nur etwas über 400 mA/s. Noch beachtlicher wird die Differenz bei längeren Zykluszeiten des Timers.
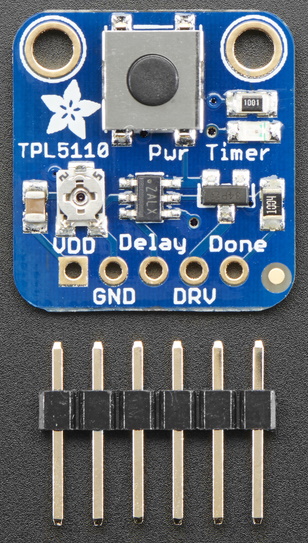
<- Bild 6: Von Adafruit gibt es ein fertiges Breakout Board für den TPL5110.
Die Brüder
Texas Instruments hat für ähnliche Anwendungen einige Brüder des TPL5110 erschaffen. Der TPL5111 beispielsweise unterscheidet sich lediglich durch eine invertierte Ausgabe des DRV-Pins: Während beim TPL5110 Pin DRV, um die Spannung einzuschalten, LOW wird, schaltet der TPL5111 DRV auf HIGH. Mit diesem Signal ist es beispielsweise möglich, den Enable-Eingang eines Low-Drop-Reglers zu aktivieren und der Last Spannung zu geben.
Dann gibt es den TPL5010: Dieser verzichtet auf einen MOSFET-Treiber und verfügt stattdessen über einen Ultra-Low-Power-Watchdog. Der TPL5010 übernimmt die Funktionalität eines integrierten Timers des Prozessors. Der Mikrocontroller kann dann in einen wesentlich stromsparenderen Modus betrieben werden – bei ausgeschaltetem internem Timer – und erst nach einem Interrupt durch den TPL5010 zurück in den aktiven Modus schalten. Durch Stromeinsparungen von fast zwei Größenordnungen ermöglicht der TPL5010 die Verwendung von deutlich kleineren Batterien für Interrupt-gesteuerte Anwendungen. Einige Normen (wie EN50271, Elektrische Geräte für die Detektion und Messung von brennbaren Gasen, giftigen Gasen oder Sauerstoff.) erfordern die Implementierung eines Watchdogs, der TPL5010 realisiert diese Watchdog-Funktion fast ohne zusätzlichen Stromverbrauch.
Literatur/Verweise:
[1] Datenblatt TPL5110: https://www.ti.com/product/TPL5110
Mehr Zeugs
- Schaun mer mal
- Moin
- Bast scho
Hier gibt es was zu lesen
- dl1dmw.darc.de
- dl1dmw.wordpress.com
- qsl.net/dg5dbz
Adresse etc.
- Op: Michael, DL1DMW
- ITU Region 1, Zone 14, DL, JO41CO
- Bad Sassendorf
- NRW / Germany